江蘇金華東機(jī)電電機(jī)的概念
電機(jī)是一種可以實現(xiàn)電能與機(jī)械能之間相互轉(zhuǎn)換的設(shè)備,其可分為電動機(jī)和發(fā)電機(jī)兩種��,前者能夠把電能轉(zhuǎn)換為機(jī)械能���,而后者能把機(jī)械能轉(zhuǎn)化為電能��。在學(xué)習(xí)STM32控制電機(jī)�,一般說的都是電動機(jī)�����。
江蘇金華東機(jī)電電機(jī)的分類
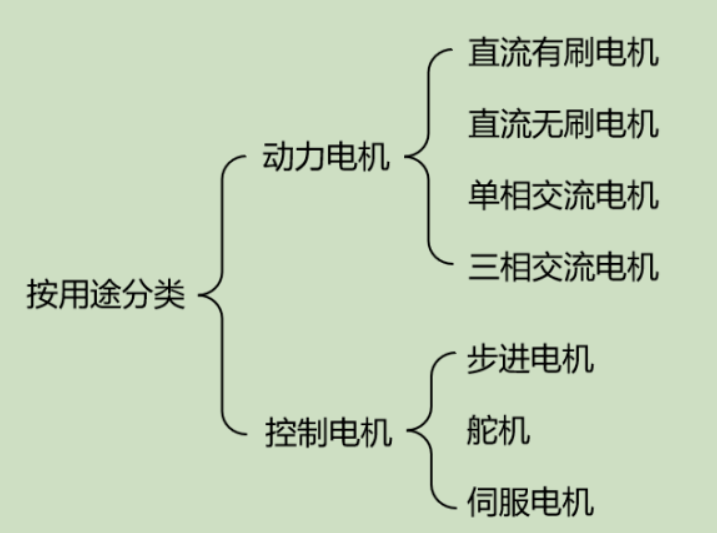
電機(jī)的種類繁多,其可按工作電源����、用途、轉(zhuǎn)子結(jié)構(gòu)�����、運(yùn)轉(zhuǎn)速度等進(jìn)行分類��。這里�,我們以用途為例,對常見的電機(jī)進(jìn)行分類��,具體的框圖如下圖所示:
江蘇金華東機(jī)電直流有刷電機(jī)
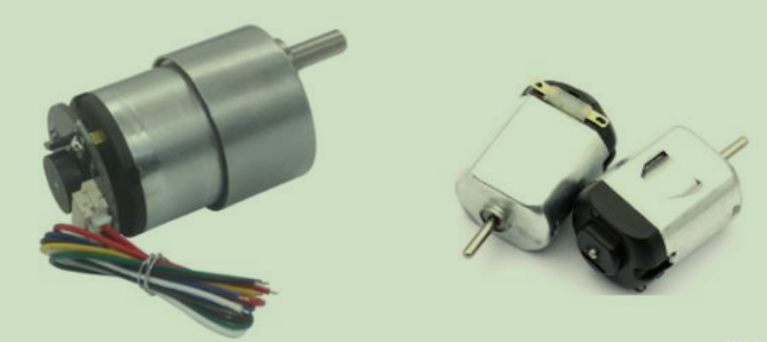
直流有刷電機(jī)(BDC)是一種內(nèi)含電刷裝置���,可以將直流電能轉(zhuǎn)化為機(jī)械能的電動機(jī),在允許的范圍內(nèi)����,只需要調(diào)整電壓,即可調(diào)整它的轉(zhuǎn)速�,因此這類電機(jī)擁有良好的調(diào)速性能。直流有刷電機(jī)的實物圖如下圖所示:
江蘇金華東機(jī)電直流無刷電機(jī)
無刷電機(jī)是指無電刷和換向器的電機(jī)���,又稱為無換向器電機(jī)�,它由電機(jī)主體和驅(qū)動器組成,是一種典型的機(jī)電一體化產(chǎn)品����。早在十九世紀(jì),就已經(jīng)出現(xiàn)了無刷形式的電機(jī)�����,即交流鼠籠式異步電動機(jī)���,但是它有許多無法克服的缺陷���,以至于人們無法不斷地探索更好的電機(jī)技術(shù)。直到上世紀(jì)中葉��,晶體管誕生了�,晶體管換向電路代替了傳統(tǒng)的電刷與換向器結(jié)構(gòu),這種新型無刷電機(jī)克服了第一代無刷電機(jī)的缺陷����。直流無刷電機(jī)的實物圖如下所示:

江蘇金華東機(jī)電舵機(jī)
舵機(jī)本身是一種”特殊“ 的直流電機(jī),其構(gòu)造不僅只有電機(jī)部分����,而且還自帶了一個控制器��,所以舵機(jī)本身就是一個閉環(huán)控制系統(tǒng)(伺服系統(tǒng))����。當(dāng)我們給舵機(jī)發(fā)送指令信號時����,它可以將指令信號變換為輸出軸的角度并保持住,即便是負(fù)載發(fā)生了變化�����,它也能夠進(jìn)行自動調(diào)節(jié)�。舵機(jī)的實物圖如下圖所示:

江蘇金華東機(jī)電步進(jìn)電機(jī)
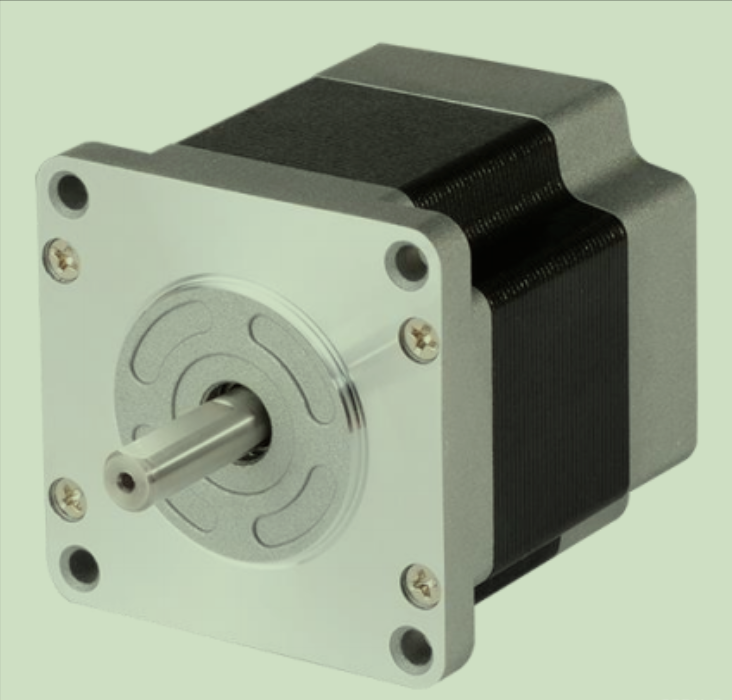
步進(jìn)電機(jī)是一種將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件����,應(yīng)用極為廣泛�。在非超負(fù)載的情況下,步進(jìn)電機(jī)的轉(zhuǎn)速���、停止的位置只取決于脈沖信號的頻率和脈沖個數(shù)���,不受負(fù)載變化的影響��。步進(jìn)電機(jī)的實物圖如下如所示:
江蘇金華東機(jī)電伺服電機(jī)
伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的電動機(jī)(伺服即絕對服從的�����,會克服慣性等影響��,價格較昂貴) 它搭配上驅(qū)動器��,形成一個完整的伺服系統(tǒng)�,就能夠精確的控制速度���、位置等���。伺服電機(jī)具有線性度高、起動轉(zhuǎn)矩大��、運(yùn)行范圍廣�����、無自轉(zhuǎn)現(xiàn)象等顯著特點(diǎn),遺憾的是就目前來看�,一套伺服系統(tǒng)的成本是比較昂貴的。

江蘇金華東機(jī)電各類電機(jī)的特點(diǎn)
江蘇金華東機(jī)電
電機(jī)類別
|
江蘇金華東機(jī)電
特點(diǎn)
|
|
直流有刷電機(jī)
直流無刷電機(jī)����、
舵機(jī)
步進(jìn)電機(jī)
伺服電機(jī)
|
驅(qū)動簡單,成本低廉�����,但是噪音大�����,故障較多����,壽命也相對較短
噪音低,運(yùn)轉(zhuǎn)流暢�����,高速�,壽命更長���,但是控制較為復(fù)雜
自成閉環(huán)系統(tǒng)��,角度控制優(yōu)秀����,價格低,但是帶負(fù)載能力較弱
結(jié)構(gòu)簡單�,驅(qū)動方便,沒有積累誤差���,不過因為其可能存在丟步現(xiàn)象��,精度不高
速度�����、位置控制精確�����,可低速運(yùn)行�����,效率高�����,壽命長����,可以說是目前最可靠的一類電機(jī)但是價格較高
|
江蘇金華東機(jī)電電機(jī)常用名詞
轉(zhuǎn)速:電機(jī)輸出軸的速度,單位一般是r/min(轉(zhuǎn)每分鐘)��,也常用RPM表示
輸出扭矩:表示了電機(jī)輸出軸可以輸出力的大小�,單位一般為N.M或者kg.cm
工作電壓:電機(jī)正常工作時的電壓
額定電流:電機(jī)正常工作時的電流
堵轉(zhuǎn)電流:電機(jī)負(fù)載過大,驅(qū)動力不足�����,發(fā)生堵轉(zhuǎn)時的電流
電機(jī)控制相關(guān)的STM32外設(shè)
電機(jī)控制與STM32定時器的關(guān)系
電機(jī)的控制與STM32定時器有著密不可分的關(guān)系�,舉一兩個例子:1、在直流有刷電機(jī)的控制中�����,我們常用脈沖寬度調(diào)制技術(shù)(PWM)來控制電壓的大小��,以此改變直流有刷電機(jī)的轉(zhuǎn)速�����。
2、對于步進(jìn)電機(jī)而言�����,接收的脈沖個數(shù)決定了它的旋轉(zhuǎn)位置�����,脈沖頻率決定了它的旋轉(zhuǎn)速度����。
從上面的例子可以看出��,電機(jī)的控制本質(zhì)上就是脈沖的控制�����,因此我們引入了STM32定時器�����,以便對脈沖信號實現(xiàn)更高效的控制���。
江蘇金華東機(jī)電基本定時器
STM32有眾多的定時器��,其中包括兩個基本定時器(TIM6和TIM7)10個通用定時器(TIM2-TIM5��、TIM9-TIM14)�����、2個高級定時器(TIM1和TIM8)���,這些定時器彼此完全獨(dú)立���,不共享任何資源。主要特性包括:16位自動重轉(zhuǎn)載遞增計數(shù)器�,16位可編程預(yù)分頻器,預(yù)分頻系數(shù)1-65536��,用于對計數(shù)器時鐘頻率進(jìn)行分頻�,還可以出發(fā)DAC同步電路,以及生成中斷/DMA請求����。
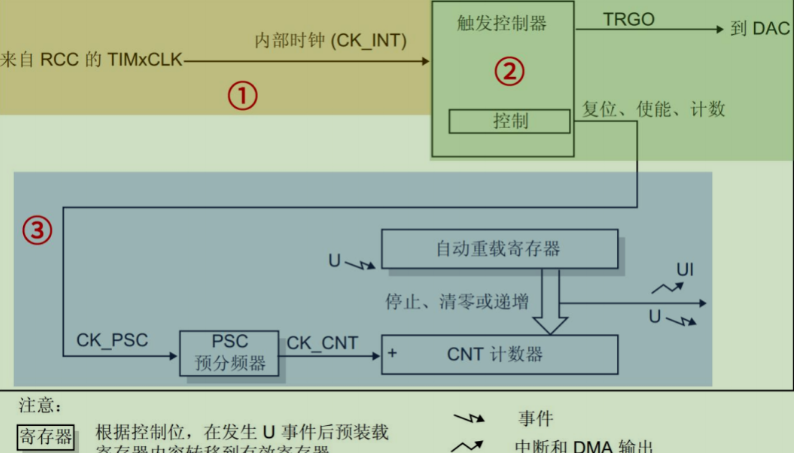
時鐘源:定時器的核心就是計數(shù)器,要實現(xiàn)計數(shù)的功能��,首先要給它一個時鐘源��,基本定時器時鐘掛載在APB1總線,它的時鐘來源于APB1但是����,基本定時器的時鐘不是直接由APB1總線直接提供的,而是先經(jīng)過一個倍頻器����。當(dāng)APB1的預(yù)分頻器系數(shù)為1�����,這個倍頻器系數(shù)為1�����,即定時器的頻率就等于APB1的頻率����,否則定時器的頻率就等于2倍的APB1時鐘頻率。
控制器:控制器除了控制定時器的復(fù)位�、使能、計數(shù)等功能之外����,還可以用于觸發(fā)DAC轉(zhuǎn)換
時基單元:時基單元包括計數(shù)器寄存器(CNT)��、預(yù)分頻寄存器(PSC)���、自動重裝載寄存器(ARR)?�;径〞r器的三個寄存器都是16位寄存器�����,即可設(shè)置值范圍為0-65535.時基單元的預(yù)分頻器PSC���,它有一個輸入和一個輸出����。輸入CK_PSC來源于控制器實際上就是來自于CK_INT�����,即2倍的APB1時鐘�����,輸出是分頻后的時鐘�。CK_CNT = CK_PSC/(PSC[15:0]+1)
江蘇金華東機(jī)電
影子寄存器:從框圖中可以看到���,預(yù)分頻器PSC后面有個影子寄存器,自動重裝載寄存器也有一個影子寄存器��。這就表示這些寄存器由影子寄存器��,影子寄存器實質(zhì)就是一個實際起作用的寄存器��,不可直接訪問��。舉個例子�����,我們可以把預(yù)分頻系數(shù)寫入預(yù)分頻寄存器中��,但是預(yù)分頻寄存器只是起到緩存數(shù)據(jù)的作用��,只有等到更新事件發(fā)生時��,預(yù)分頻器的值才會被寫入到其影子寄存器中���,這時才真正起作用。自動重裝載寄存器同上述一樣��,唯一不同的在于自動重裝載寄存器是否具有緩沖作用還受到ARPE的影響,當(dāng)該位置為0時����,ARR寄存器不進(jìn)行緩沖,直接寫入影子寄存器中���,當(dāng)該位置為1時��,不起作用��,等到更新事件發(fā)生時��,才寫入到影子寄存器中���。這就是二者之間的差別。
江蘇金華東機(jī)電
更新事件:更新事件產(chǎn)生有兩種情況���,其一是由軟件產(chǎn)生��,將TIMx_EGR寄存器的UG置位1�����,產(chǎn)生更新事件后�����,硬件自動會將UG位清0��,二是由硬件產(chǎn)生�����,滿足以下條件時即可���,計數(shù)器的值等于自動重裝載寄存器的影子寄存器的值����,這時產(chǎn)生更新事件�。
高級定時器
高級定時器簡介
控制器
控制器包括:從模式控制器��、編碼器接口和觸發(fā)控制器(TRGO) �。從模式控制器可以控制計數(shù)器復(fù)位、啟動�����、遞增/遞減、計數(shù)���。編碼器接口針對編碼器計數(shù)����。觸發(fā)控制器用來提供觸發(fā)信號給別的外設(shè)�����,比如為其他定時器提供時鐘或者為DAC/ADC的觸發(fā)轉(zhuǎn)換提供信號���。
時基單元
包括基本定時器上面的時基單元�。
高級定時器的計數(shù)模式有三種:遞增計數(shù)模式�、遞減計數(shù)模式和中心對齊模式
遞增計數(shù)模式:遞增計數(shù)模式和基本計數(shù)器的計數(shù)模式是一樣的。
遞減計數(shù)模式:遞減計數(shù)模式就是來一個計數(shù)脈沖就減1����,稱為定時器下溢。定時器溢出就會產(chǎn)生更新事件的發(fā)生���,然后計數(shù)器又重新從自動重裝載寄存器影子寄存器的值開始遞減計數(shù)��,如此循環(huán)���。
中心對齊模式:中心對齊模式就是該模式下計數(shù)器先從0開始遞增計數(shù)����,直到計數(shù)器的值等于自動重裝載寄存器的值-1時�����,定時器上溢�����,同時生成更新事件����,然后自動重載寄存器影子寄存器的值開始遞減計算,直到計數(shù)值等于1時�����,定時器下溢�,同時生成更新事件�����,然后又從0開始遞增計數(shù),依次循環(huán)�����。每次定時器上溢或者下溢都會生成更新事件�。計數(shù)器的計數(shù)模式的設(shè)置可以參考相應(yīng)的寄存器配置。
輸入捕獲
輸入捕獲包括4個輸入捕獲通道����、輸入濾波和邊沿檢測以及預(yù)分頻器等部分。IO端口通過復(fù)用功能與這些通道相連���。配置好IO端口的復(fù)用之后�����,將需要測量的信號輸入到相應(yīng)的IO端口�����,輸入捕獲部分可以對輸入信號的上升沿���、下降沿或者雙邊沿進(jìn)行捕獲,常見的測量有:測量輸入信號的脈沖寬度�、測量PWM輸入信號的頻率和占空比等�。
江蘇金華東機(jī)電
輸出比較
輸出比較包括:4個輸出比較通道����,3個互補(bǔ)通道、死區(qū)發(fā)生器以及輸出控制器�����,用于輸出比較模式或者PWM模式.
高級定時器輸出比較部分和通用定時器相比�,多了帶死區(qū)控制的互補(bǔ)輸出功能。
斷路功能
斷路功能也稱之為剎車功能���,一般用于電機(jī)控制的剎車���。斷路源可以是剎車輸入的引腳,也可以是一個時鐘失敗事件���。時鐘失敗事件由復(fù)位時鐘控制器中的時鐘安全系統(tǒng)產(chǎn)生��。系統(tǒng)復(fù)位后����,斷路功能默認(rèn)被禁止�,MOE位為低。





 +86-025-52242222
+86-025-52242222 jhdmotor@126.com
jhdmotor@126.com
